픽스호크의 전력을 연결하는 배선도는 아래와 같다.
BEC = 일정한 전압을 공급하는 장치로서 픽스호크가 아닌 라즈베리 파이, 젯슨 보드 등에 전원 공급이 가능하다.
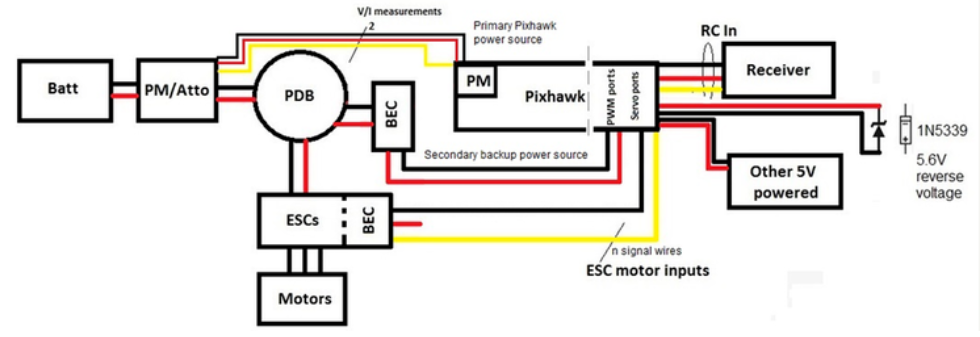
- 픽스호크 기본 wiring
RC 로 조종기의 신호를 수신 가능하다(ppm, sbus)
main output 을 모터의 ESC 와 연결한다.
모터의 순서와 output 의 순서를 맞게 연결해야한다. 모터의 순서는 아래 링크를 참조한다.
https://ardupilot.org/copter/docs/connect-escs-and-motors.html

전체적인 배선도는 아래와 같다.
단 조립할때 부저와 픽스호크를 5cm 보다 멀게 부착 해야한다. (가속도계에 영향이 가기 때문)

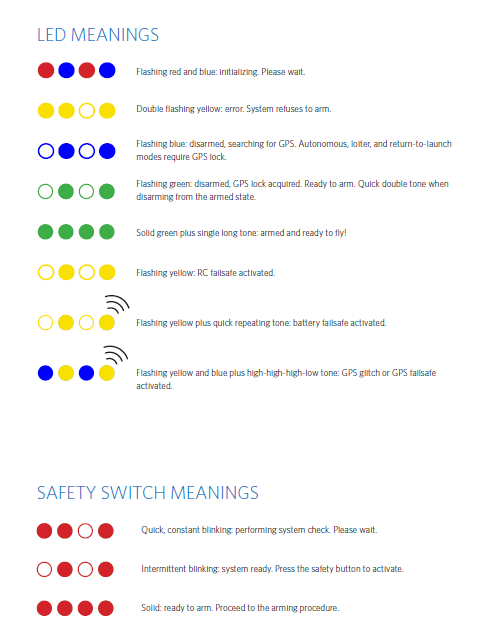
- 픽스호크의 부착된 LED 의 신호 의미
- 픽스호크 기본 설정
픽스호크를 사용함에 있어서 기본설정에 순서는 아래와 같다.
1) frame 설정
2) 가속도계 교정(accelerometer calibration)
최대한 무게중심에서 calibration 진행
3) 컴퍼스 교정(compass calibration)
최대한 무게중심에서 calibration 진행
4) 라디오 교정(radio calibration)
radio 에서 각 체널값이 가만히 있었을때, 중간값이 나오는지 확인
5) 변속기 교정(ESC calibration)
- 프로펠러 제거
- 스로틀 스틱을 최대로 올린 후 전원(배터리) 연결
- 음성 메시지 확인후 전원 분리
- 전원 재 연결
- 안전 시위치 3초 이상 길게 누르기
- 변속기 high 위치 인식 비프음 확인
- 스로틀 스틱을 최하로 내린 후 변속기 LOW 위치 인식 비프음 확인
- 배터리 분리
6) 모터 배열 및 회전 방향 확인
BLDC 모터의 경우 두가닥의 전선을 바꾸면 회전 방향이 달라진다.
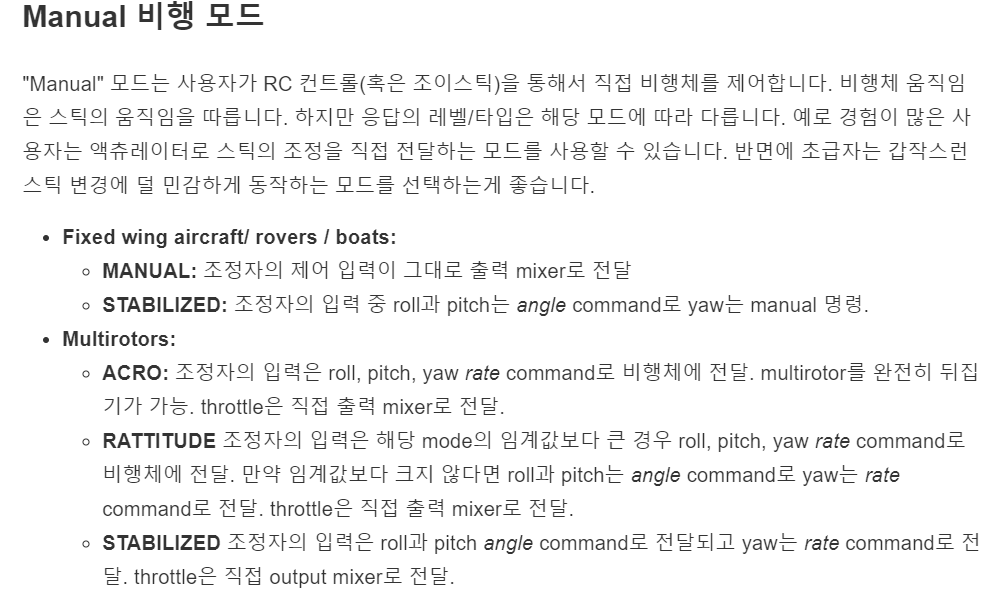
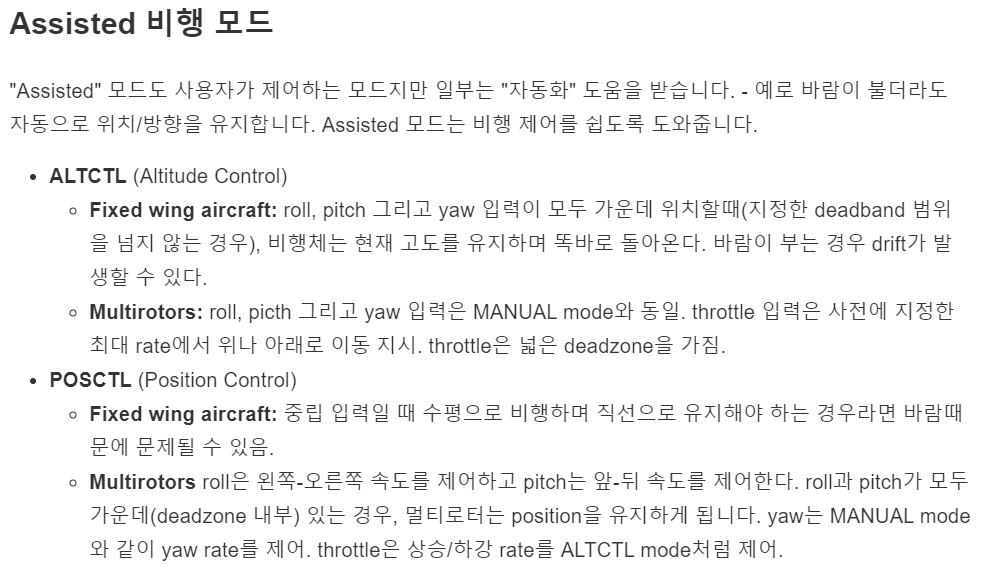
- 픽스호크 비행모드
비행모드는 아래와 같다. 비행모드를 미리 조종기의 값에 배정하고 비행하는동안 조종기의 신호 변경으로 비행 모드를 바꿀 수 있다.

- 비행시 절차
1) 세이프티 스위치 2초간 누르기
LED 가 붉은색으로 점등된다.
2) 시동 걸기
조종기의 방향으로 시동을 걸 수 있다.
3) 이륙
'pixhawk' 카테고리의 다른 글
| MAVROS OFFBOARD 사용 예시 코드 (9) | 2020.07.07 |
|---|---|
| PIXHAWK SIMULATION (39) | 2020.05.20 |

