System Overview

High-Level Controller : Raspberry pi4
Low-Level Controller : Pixhawk2
| Maximum Speed | 12 m/s | Rising/Descending Maximum Speed |
상승 : 3m/s 하강 : 1m/s |
| Crusing Speed | 7 m/s | Weight | 3.8kg |
| Length*Width*Height | 550*550*300mm | Maximum Flight Weight | 6.0kg |
| Maximum Flight time | 25분 | Battery Model | Polytronics 10000mah 4s Li-pi Battery |
Spec
Mission
The home -> wp1, wp3 -> home 구간은 Artificial Potential Field method을 사용하여 곡선 궤적으로 비행합니다.
나머지 부분은 point-to-point control method을 사용하고 있습니다.
Obstacle Avoidance Method (Artificial Potential Field)
The Artificial Potential Field는 인력(Attractive) 및 반발력(Repulsive) 항으로 구성됩니다. 인력 항에서는 목표 좌표와 가까울수록 포텐셜 에너지가 낮아집니다. 반면, 반발력 용어는 장애물과 가까울수록 포텐셜 에너지가 커집니다. 즉, 포텐셜 에너지가 감소하는 방향으로 경로를 설정함으로써, 장애물을 피하고 목표 지점에 도달할 수 있습니다. 목표 좌표와 비행 금지 구역의 중심 좌표 간의 거리는 다음과 같이 계산됩니다.
xgoal과 xobs는 각각 목표 좌표와 비행 금지 구역의 중심 좌표의 위치입니다. 이를 통해 Artificial Potential Field 방정식은 다음과 같이 설립됩니다.
목표 좌표로부터의 거리가 dgoal보다 큰 경우, Uatt의 크기가 선형적으로 증가합니다. 즉, 기울기가 일정해집니다. 비행 금지 구역의 중심 좌표로부터의 거리가 dos보다 큰 경우, 반발력 항은 포텐셜 에너지에 영향을 주지 않습니다. 아래 방정식은 포텐셜 필드의 grandient를 나타냅니다.
드론의 속도가 인공 포텐셜 필드의 기울기와 반대 방향으로 설정되면, 비행 금지 구역을 피해 적절한 경로로 비행할 것입니다.
적절한 dgoal*, dos* 값이 설정되면, k1과 k2 계수도 적절하게 설정되어야 합니다. 드론의 최대 속도가 Vmax이고 계수가 아래와 같이 설정되면, 비행 속도는 최대 속도를 초과하지 않고 비행 금지 구역의 경계에 닿았을 때 최대 속도에서 반발력이 발생합니다.
r은 비행 금지 구역의 반지름입니다.
드론이 생성된 경로를 통해 이동할 때, PIXHAWK은 궤적으로부터의 현재 위치와 속도의 차이를 사용하여 sub-controller에 명령합니다.
실제 비행 시험 로그는 아래와 같습니다.
| Horizontal Error(m) | Vertical Error(m) | |
| WP1 | 0.35 | 0.1 |
| WP2 | 0.88 | 1.2 |
| WP3 | 0.83 | 1.2 |
비행 중 위치 오차가 다음 웨이포인트로 변경되는 threshold 값인 2m 이내에 있다는 것을 확인할 수 있습니다.
Hardware Design for Mission
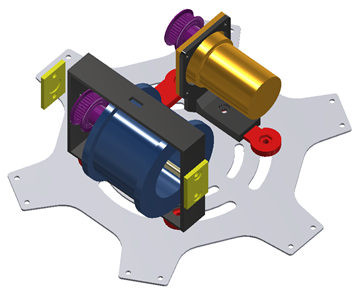
드론의 작동이나 윈치 모터의 오작동으로 인한 강한 진동은 윈치의 체결 볼트를 풀어줄 수 있습니다. 이런 결함들은 비상 키트를 포함한 Winch 부품의 손실을 초래합니다. 이를 방지하기 위한 방법으로, 아래 그림과 같이 윈치 설계 시 평평한 와셔와 스프링 와셔를 사용하였습니다. 또한, 너트가 흔들림으로 인해 회전하지 않도록 너트를 삽입하였습니다.

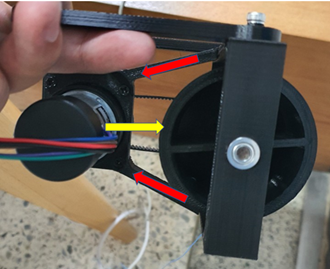
마찬가지로, 위 그림에서 보이는 idler가 pulley에 연결될 타이밍 벨트의 긴장을 유지하기 위해 부착됩니다. 이 경우에는, 일정한 긴장을 유지하는 과정에서 Winch 프레임에 부하가 가해집니다. 이를 분산시키기 위해, 그림과 같이 여러 개의 ribs를 제작하였습니다.
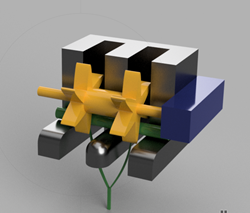
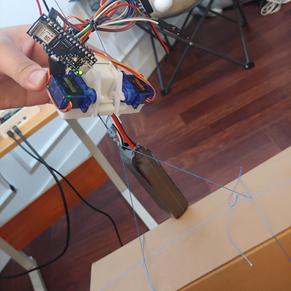
분리 장치의 안정성은 가장 중요한 요소입니다. 분리 장치가 어떤 각도에서도 짐을 떨어뜨리지 않도록 설계되어 있습니다. 실제로 실험할 때, 드론에서 발생할 수 있는 흔들림보다는 힘으로 흔들릴 때 전혀 문제가 없음이 확인되었습니다. 무게가 강하게 흔들릴때도 견딜 수 있는 안정성도 높습니다. 분리 장치의 무게를 모터의 분산시켜 짐의 부하에 견딜 수 있도록 설계되어 있습니다.
두 개의 서보 모터가 사용되기 때문에, 분리 장치는 비상 키트의 무게를 여유롭게 견딜 수 있으며, 비상 키트는 빠르게 분리됩니다. 또한, 물건을 떨어뜨리는 명령을 실행할 때, 닫힌 문이 열리는 것뿐만 아니라, 물레방아 형태로 따라오는 후방 날개가 짐을 밀어내므로 안정적으로 떨어뜨릴 수 있습니다.
비상 키트 분리기와 드론 간의 통신에서 BLE 무선 통신을 사용하여 불필요한 유선 통신 회선이 감소되었습니다. 따라서 드론은 더 가볍게 비행할 수 있고, 윈치 장치는 선의 꼬임 걱정 없이 작동할 수 있습니다.
분리 장치가 작동하지 않을 때는, 바람이나 외부 힘에 의해 분리되지 않도록 모터가 강하게 고정 할 수 있습니다.
Safety
1. GPS sensor failure
GCS에서 GPS 상태를 실시간으로 확인할 수 있습니다. 따라서 GPS 수신에 문제가 있거나 정확도가 불가능할 때 GCS 또는 조종사가 즉시 수동 제어 모드로 전환합니다.
2. Power Issues
비행에 사용되는 배터리가 15% 미만으로 떨어지면 GCS에서 경고음이 울리며, 추가 조치 없이 배터리가 7% 미만으로 떨어지면 착륙 모드로 전환하여 홈으로 돌아옵니다.
3. Communication Failure
컨트롤러 신호가 0.5초 이상 끊어지면 리턴 모드로 전환되어 홈으로 돌아옵니다. 또한 자동 비행 중 상위 컨트롤러의 데이터 신호가 5초 이상 끊어지면 리턴 모드로 전환되어 홈으로 돌아옵니다.
4 Geo Fence
Geo Fence가 설정되어 있고 드론이 예상치 못한 비행 범위를 벗어날 경우 리턴 모드로 전환되어 홈으로 돌아옵니다. 모든 리턴 모드는 지상 구조물과의 충돌을 방지하기 위해 30m의 고도에서 진행됩니다.
5 Switching control modes
수동 제어 모드, 자동 비행 모드, 리턴 모드로 전환하는 신호는 컨트롤러의 특정 채널에 할당되어 있어 긴급 상황에서 즉시 모드 전환이 가능합니다.
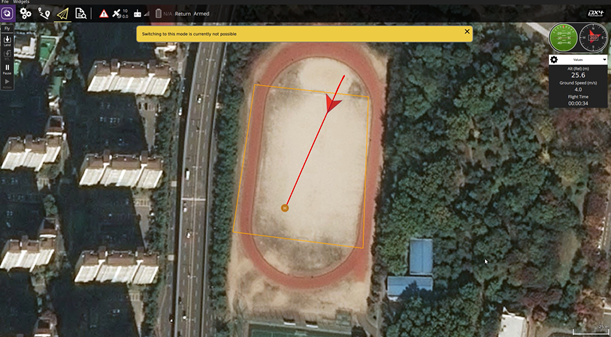
위 그림에서 볼 수 있듯이, Geo Fence를 벗어나면 안쪽으로 다시 돌아옵니다.
Flight Video
https://www.youtube.com/watch?v=5CS4bZP0D6A
Code
https://github.com/kws1611/sunrise.git