Purpose
Aerial Robot은 다양한 분야에서 사용할 수 있습니다. Aerial robot 의 대표적인 드론은 배터리 사용량 때문에 짧은 시간 동안만 비행할 수 있습니다. 더 긴 시간 비행하기 위해 tethered 드론이 사용되지만, 유선 시스템은 드론의 움직임을 제한합니다. 그라운드뿐만 아니라 드론 아래에도 윈치가 배치된 멀티 tethered 드론은 더 많은 움직임의 자유와 더 긴 비행 시간을 가질 수 있는 해결책이 될 수 있습니다.

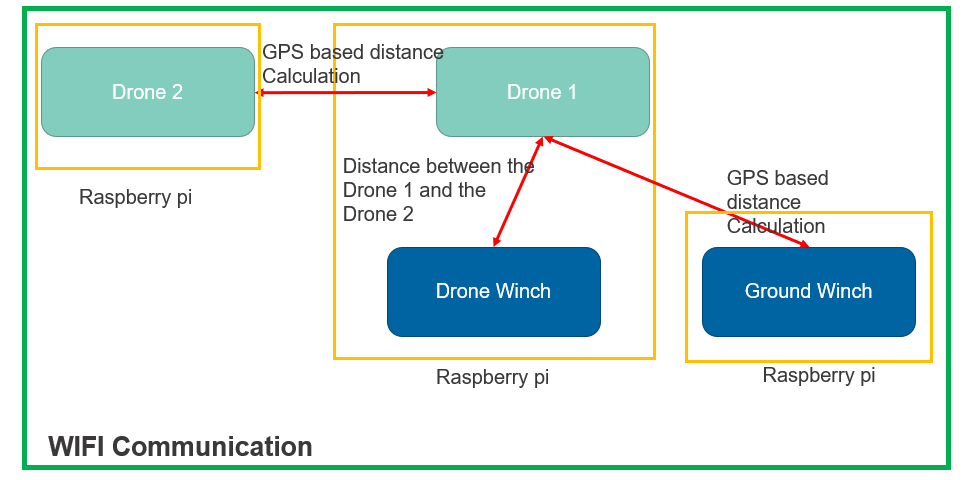
비행 시간 문제를 해결하는 멀티 tethered 드론의 기본 개념은 위 그림에서 확인할 수 있습니다. A 드론은 에너지를 지상 또는 다른 드론에서 전달 받아 다른 드론에 전력을 전달하는 역할을 합니다. 드론과 지상의 거리를 기반으로 cable의 길이를 제어합니다. 본 연구에서는 두 대의 드론으로 지상에서 에너지를 유선으로 공급받아 공중에서 전력을 공급할 수 있는 드론을 개발하는것이 연구 목적입니다.
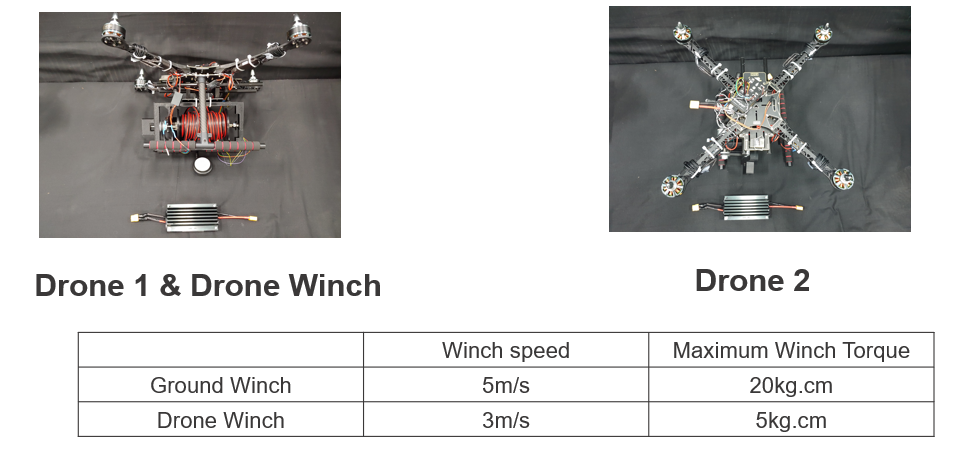
연구에 개발한 대표적인 하드웨어와 역할은 아래와 같습니다.
- Winch: 케이블 꼬임 방지, 케이블 길이 제어
- Tethered Cable: 전력 공급 및 경량화를 위한 케이블 길이 및 두께 설정
- Power supplies: 전원 공급 방식 설정, 전력 분배
Energy Supply Method

Hardware

System

Drone autonomous flight algorithm

Ground & Drone winch system algorithm



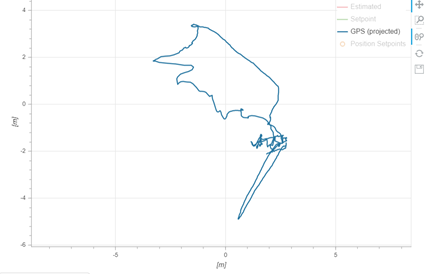
GPS trajectory

1st experiment log data
| Flight Distance | 87.0m |
| Average Speed | 3.3km/h |
| Max Speed | 36.8 km/h |
| Max Speed Up | 2.2km/h |
| Max Speed Down | 1.7km/h |
| Average Current | 3.5A |
| Max Current | 10.1A |
| Flight Time | 9min 22sec |
2nd experiment log data
| Flight Distance | 112.3m |
| Average Speed | 4km/h |
| Max Speed | 20.1km/h |
| Max Speed Up | 2.6km/h |
| Max Speed Down | 1.7km/h |
| Average Current | 4A |
| Max Current | 8.7A |
| Flight Time | 12min 30sec |
Limitation
아래 그림과 같이 일정 상황에서 자기장이 지속적으로 발생합니다. 이는 윈치 케이블에 의한 자기장으로 추정됩니다. 또한 주변 자기장으로 인해 초기 보정이 원활하게 진행되지 않았습니다. 따라서 Yaw 축에 대한 추정이 정확하지 않았습니다.

또한 급격한 전압 하락이 발생했습니다. 정확한 요인은 아직 알려지지 않았지만, 드론의 전압이 24V에서 16V로 떨어졌습니다.
