Time-Continuous Real-Time Trajectory Generation for Safe Autonomous Flight of a Quadrotor in Unknown Environment
https://www.mdpi.com/2076-3417/11/7/3238
Time-Continuous Real-Time Trajectory Generation for Safe Autonomous Flight of a Quadrotor in Unknown Environment
In this paper, we present an efficient global and local replanning method for a quadrotor to complete a flight mission in a cluttered and unmapped environment. A minimum-snap global path planner generates a global trajectory that comprises some waypoints i
www.mdpi.com
Optimization 방식이 아닌 Analytical 한 방식으로 회비 경로를 제공한다. 따라서 local-Minina 에 빠지지 않고 적은 계산량으로 빠르게 대응할 수 있다.
- Algorithm

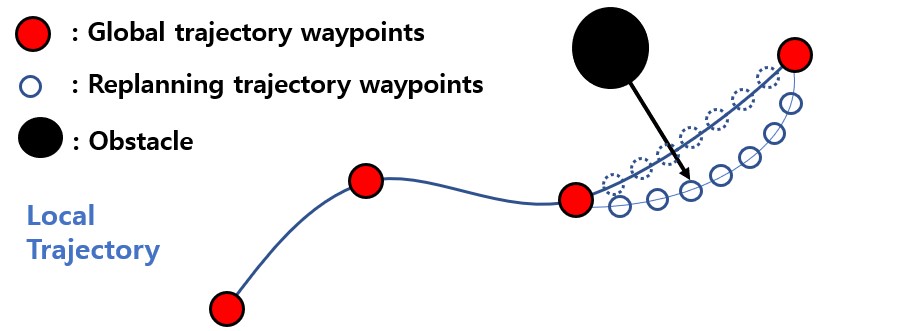
Global Trajectory 를 만들때는 Minimum Snap 을 사용하여 경로를 생성한다. trajectory segmentation 의 끝부분에 position, velocity, acceleration, jerk, snap 을 맞추어 준다. 따라서 9차 다항식으로 경로를 구성한다.
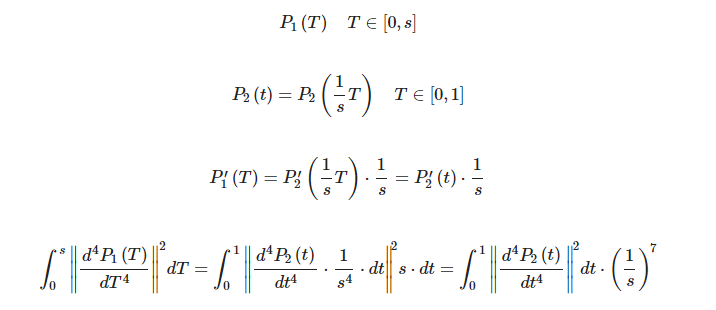
- Time scaling factor
T = s*t 라고 한다면 아래와 같이 적을 수 있다. 따라서 계산량을 줄일 수 있다.
- smoothing
smoothing 을 하기 전과 후 사진이다. smoothing 을 함으로써 경로가 더 부드러워 진다.
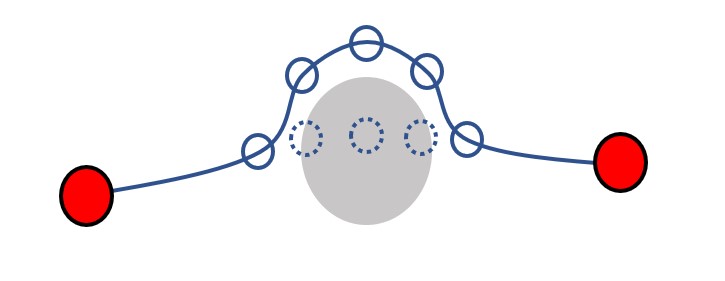
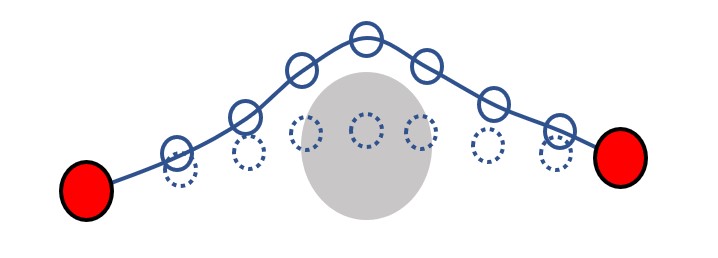
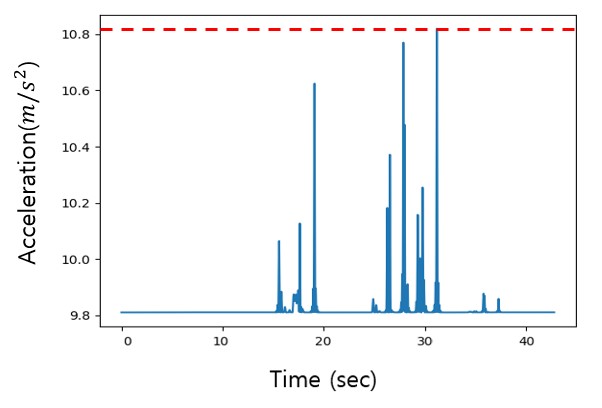
smoothing 하기 전과 후의 추력 차이를 보면 아래와 같다. smoothing 을 통해 필요한 추력이 줄어든다

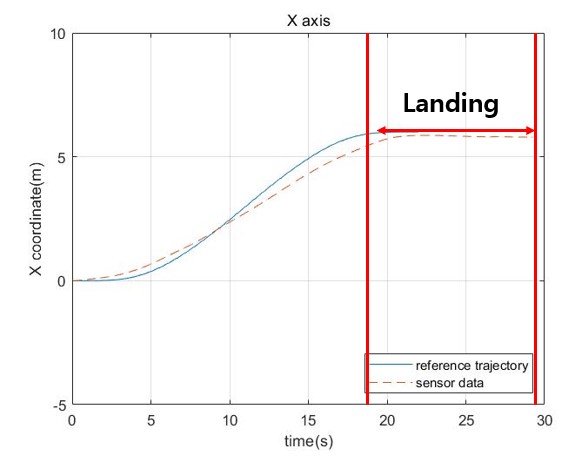
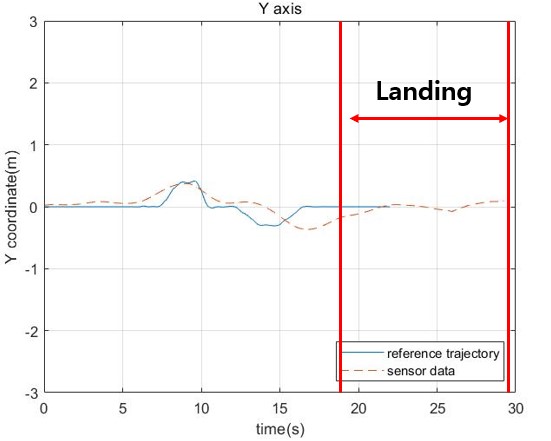
- Experiment
실제 실험은 아래와 같다



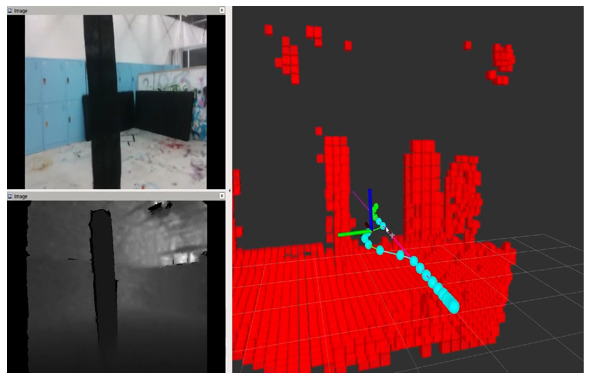

circular buffer 를 사용하여 나타낸다. circular buffer 를 통해 빠르고 메모리 관리가 효율적이다.
-reference
Usenko, V.; Von Stumberg, L.; Pangercic, A.; Cremers, D. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 215–222.
Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525
Richter, C.; Bry, A.; Roy, N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2016; pp. 649–666.
Oleynikova, H.; Burri, M.; Taylor, Z.; Nieto, J.; Siegwart, R.; Galceran, E. Continuous-time trajectory optimization for online UAV replanning. In Proceedings of the 2016 IEEE/RSJ international conference on intelligent robots and systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5332–5339.