칼만 필터 (Kalman Filter)
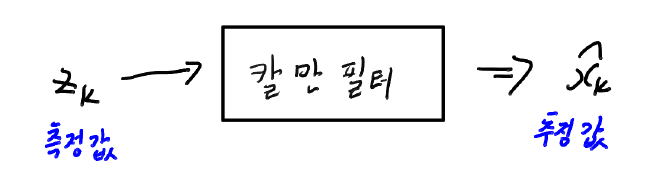
칼만필터의 대략적인 개요는 아래와 같다

예측과 측정값을 통해 값을 추정하는 것이다.
기본이 되는 칼만 필터의 수식은 아래와 같다.

- 시스템 모델 A, Q 를 기초로 하여 X^, P^ 를 예측
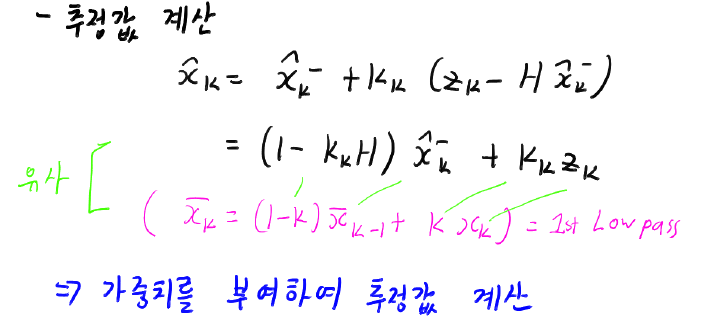
- 측정값&예측값 차이로 보정하여 새로운 값 추정
기본적인 시스템 모델은 아래와 같이 표현 할 수 있다.

여기서 A 는 상태 전이 행렬 이라고 불리며 정의는 아래와 같다.


추정값 계산을 할때 1st low pass filter 와 같이 가중치를 이용하여 값을 계산하는 것은 똑같지만, 가중치가 계속 바뀌는것이 칼만 필터의 특징이다. 가중치는 kalman gain 이고 K 로 적는다
kalman gain (칼만 이득) 을 계산하는 과정은 아래와 같다

위의 식을 행렬이 아니라 일반 숫자라고 생각하고 역함수를 나누기 라고 한다면 아래와 같다

확장 칼만 필터 (Extended Kalman Filter)
- 확장 칼만 필터는 일반 칼만 필터와 크게 다르지 않다. 선형적인 부분에서의 작동되는 칼만 필터의 한계때문에 고안된 확장 칼만 필터는 비선형적인 시스템에서도 사용 가능하게 해준다.
- 일반 칼만 필터와 다른 부분은 아래와 같다
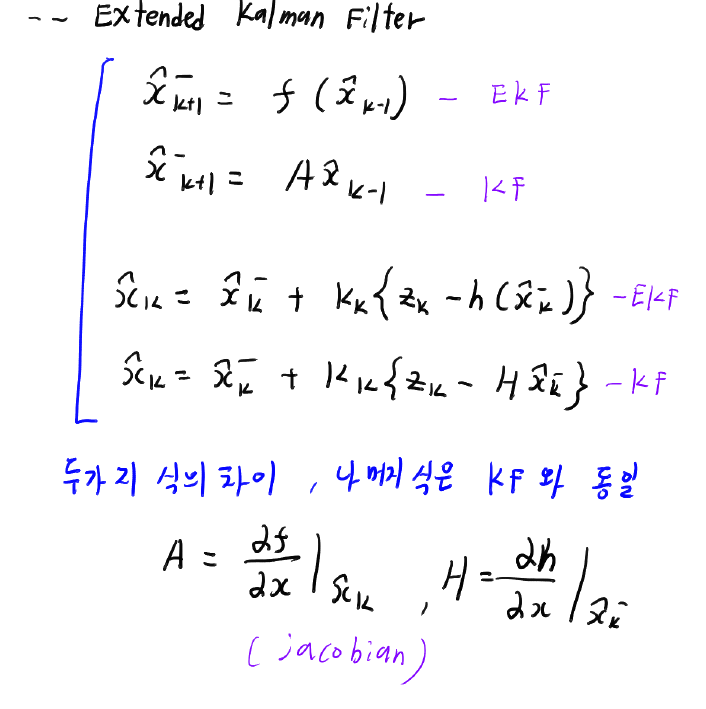
즉 확장 칼만 필터는 A 와 H대신에 비선형 모델의 자코비언을 사용한다.
'Sensor fusion' 카테고리의 다른 글
| Extended Kalman Filter & Error state Kalman Filter (IMU + Motion Capture) (6) | 2020.07.23 |
|---|---|
| [우수학부생] Kalman Filter 을 이용한 자세 추정 및 모션 캡처를 이용한 실험 결과 (12) | 2020.02.14 |
| imu 센서를 활용한 attitude estimation (quaternion base) (4) | 2020.02.10 |


